==========================================
1.電動機(モーター)の種類と特徴
一般的には直流モーターと交流モーターとに大別されます。コイルセンターなどの一般の設備で最も多く用いられているものは、直流モーターおよび交流モーターの中の三相誘導モーター(インダクションモーター)です。
直流モーターは速度が簡単に変えられるのが特徴で、ライン設備の駆動モーターのように速度を自由に変える必要がある場合に使用されます。
三相誘導モーターは三相交流のサイクル変化に対応して回転するもので、従来は油圧ポンプのように一定速度で回転する用途に使用されていました。
最近ではインバーターの普及で交流サイクルを自由に変化させて回転数を変えられるようになったため、ライン設備の駆動用にも使われるようになりました。最近の電車に交流が使われるようになったのは、この技術によるものです。
1) 直流モーター
(1)特徴
直流モーターの最大の特徴は、容易に回転数が変えられることです。しかし、三相誘導モーターと比較してブラシと整流子などが必要で構造が複雑な上、外部から取り入れた交流電源を直流に変換する装置(例えば、サイリスタアンプなど)が必要で高価格となります。最近は電子技術の急速な発展により、サイリスタ素子などの高性能化・汎用化が進んで交流を直流に変換する装置が簡易化したため、直流モーターは相変わらず広く使用されています。
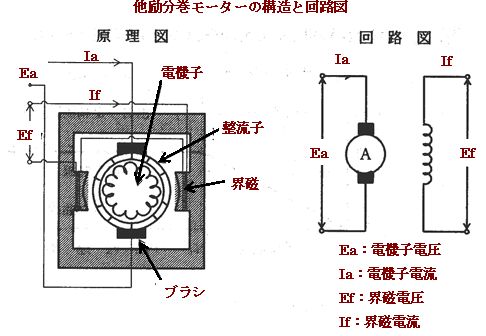
(2)原理と特性
回転速度を変化させるには電機子電圧 Ea を変化させる方法と、界磁電流 If を変化させる方法とがあります。前者を電機子電圧制御(電圧制御)と言い、ライン全体の速度制御に使用されています。後者は界磁電流制御(界磁制御)といい、コイル径の変化に応じて巻き取り張力を一定に保ったり (径補償)、丸刃の外径変化に応じて回転数を制御したり、個々の機器を単独に制御する為に使われます。
2) 交流モーター
 (1)特徴
(1)特徴三相誘導モーターは、工作機械などの一定の回転数で使用される用途に広く使われています。三相交流を電源とし、原則一定の速度で回転します。
(2)原理と特性
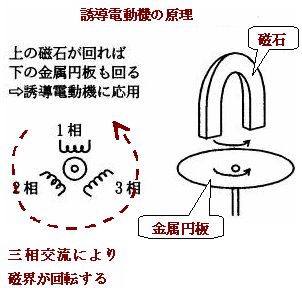
右図に示すように金属円板の上で永久磁石を回すと金属円板は磁力によって回転します。 この永久磁石の代わりに三相交流の各相で電磁石を作って円状に並べると、三相交流のサイクルの変化に応じて磁場が回転するため、金属円板もやはり磁力によって回転します。 これが三相誘導モーターの原理です。従って三相交流のサイクルによって回転数は決まりますが、この回転数を変化させるにはインバーターで交流のサイクルを変化させる必要があります。 直流モーターと比較して整流子とブラシが不要な為、構造的には簡単です。
2.ライン速度の制御システム(シーケンス制御については「シーケンス制御」を参照)
コイルセンターで使用されるライン設備は、操業上の都合により任意に速度を変える必要があるため、ラインの各設備の駆動用モーターは、速度制御およびトルク制御が比較的簡単な直流モーターが一般的に使われて来ました。最近は交流モーターの速度制御技術が進んだため、交流も使われるようになってきました。
可変速モーターとして最も一般的に使用されるのが、サイリスタレオナード制御方式による直流モーターで、広く工業設備の速度制御用に活用されていますが、最近、直流電動機に代わってメンテナンスが比較的容易なインバーターによる可変速交流モーターが採用されるようになり始めています。
(1)直流モーターのサイリスタレオナード制御方式
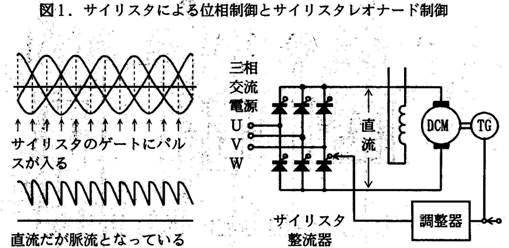 最近の直流モーターの速度制御は、殆どサイリスタレオナード制御が使われています。
最近の直流モーターの速度制御は、殆どサイリスタレオナード制御が使われています。
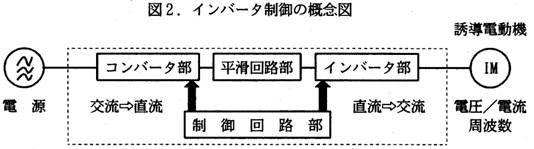
(2)交流誘導モーター(インダクションモーター)とインバータ(周波数)制御(VVVF)
 |
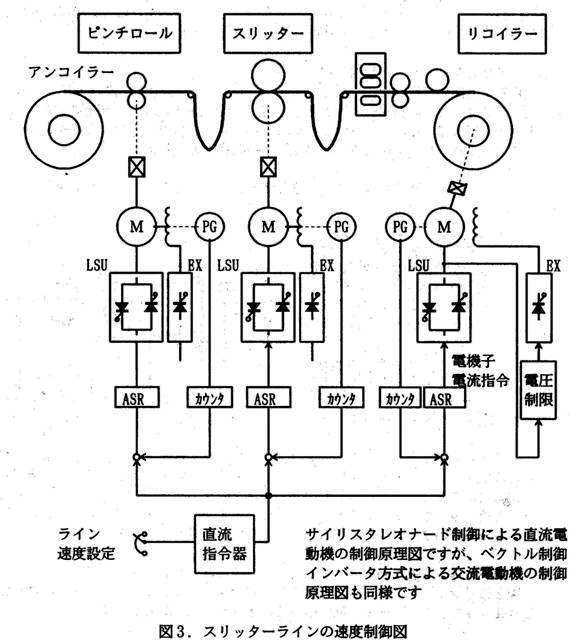
3.スリッターラインの電気制御回路例
スリッターラインのライン全体の電気制御機構を図3に示します。左下にある「ライン速度設定」の指令により、各モーターの電機子電圧が一斉に変化されてラインの速度が変化しますが、そのほかに各モーターには電機子電流を変更できる回路が、独立に個別に設けられているのがわかります。
4.各機器の個別電気制御
スリッターラインやレベラーシャーライン等の運転制御は、ライン全体で一斉に加減速ができることは当然必要ですが、各単体の機器も独立に速度を変えたりトルクを変えたりできる調整機能が必要になります。 例えば、アンコラーやリコイラーではコイルの外径が刻々変化するので、リールの回転数をそれに合わせて変化させないと、ラインの速度と同期しなくなるため、コイルの「径補償」の制御回路が入っています。 さらに丸刃やロール類の場合のように外周を研磨して再使用してゆくにつれ直径が小さくなる場合には、回転数を上げて行かなければ鋼板の速度について行けなくなります。径補償制御用のバーニアがそれです。 これらの個別機器の制御はいずれも各モーターの界磁電流の制御によって行われます。
これらの各モーター個別の電気制御について、以下に説明します。
1)アンコイラーの電気制御
アンコイラーでコイルを巻き戻す場合、古い設備ではリールにメカニカルブレーキを設置して鋼板にバックテンションをかける場合もありますが、張力を一定に制御し難いため、最近はリールにモーターをつけて発電機として使用することで一定のバックテンションを与える制御回路が組まれるのが一般的です。
鋼板の速度を一定に保つ為には、アンコイラーのコイル外径が小さくなるにつれて、アンコイラーの回転数を上げて鋼板にかかる張力が一定になるよう制御します。コイルの外径 D はライン速度 L とその時点でのリールの回転数 R を検出すれば、 D×π×R=Lで自動的に計算させることができます。 鋼板の張力を一定にするためには、この径補償のほかに次の補償も必要です。
(1)機械ロス補償
各機器別の摩擦などによるロスの補償を行う必要があります
(2)慣性補償
コイルなどのように大きな重量のものは起動・停止などの際に、動き出しにくい性質があり、これを慣性といいます。これを修正するのが慣性補償で、例えば重量の大きなコイルを他の機器と同じ速度で加速するためには慣性補償のトルクを追加する必要があります。
2)スリッター丸刃の周速制御
スリット加工時、研磨によって丸刃の外径寸法が減少してゆくにつれ、丸刃の回転数を増やす必要があります。丸刃の駆動用モーターは回転数の制御が可能である必要があります。
3)リコイラーの電気制御
アンコイラーの場合と同様、リコイラーの場合もコイルの外径補償、コイルの慣性補償制御が必要です。リコイラーの場合巻き取り張力が適正でないと、製品コイルのつぶれ(座屈)や搬送中の巻きズレ、スリップ疵などの原因になる危険がありますので、巻取り張力(テンション)は的確に掛ける制御が必要です。
鋼板にはテンション装置でバックテンションが掛けられますが、テンション装置では条毎に均一なバックテンションが掛けられることが大切で、扱う製品に最適なテンション装置を選択することが重要です。
==========================================
HOME 技術資料室 技術用語