===============================================
1.サーボ機構
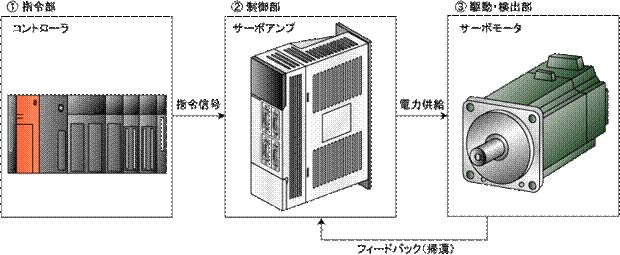
サーボ機構とは、ラテン語で奴隷を意味する Servus が語源と言われ、指示された命令通りに動くように構成された制御機構のことです。 俊敏で高精度な動作を実現するため、自身の動作状態を常に確認し、指令とのずれが出ないようにフィードバック (feed back) していることが特徴です。指令信号とフィードバック信号との差が小さくなるようにいかに制御するかが重要となります。
JISでの定義:サーボ機構とは、物体の位置、方位、姿勢などを制御量として、目的の任意の変化に追随するように構成された制御系
サーボ機構は、大きく次のように分類されます。
| 指令部 | 動作の指令信号を出します。 |
| 制御部 | 指令通りにモータなどが動かせるようにします。 |
| 駆動・検出部 | 制御対象を駆動したり、その状態を検出したりします。 |
2.サーボモータの種類と得失
一般的に利用されているサーボモータは、SM (同期)形 AC サーボモータ、IM (誘導)形 AC サーボモータ、DC サーボモータの3種類です。FA 関連では以下のような理由のため、特に需要の多い小・中容量では、 SM 形 AC サーボが主流です。このため、通常のFA 用途では、サーボと言えば、SM 形 AC サーボと思って良いでしょう。
IM 形 AC サーボモータは、構造堅牢で、高速・大トルク対応が可能、大容量で効率が良いことから、大容量 (7.5KW 以上)で主に利用されています。 しかし、近年ではベクトル制御方式と呼ばれる方式が出現し、IM 形 AC サーボモータ利用分野に取って代わっています。
| 種類 | 構造 | 特徴 | |
| 長所< | 短所 | ||
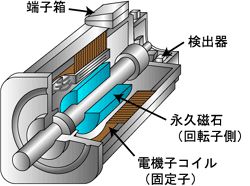
| SM(同期)形 ACサーボモータ |
|
*メンテナンスフリー。 *耐環境性に優れている。 *大トルクが可能。 *停電時の発電制御可能。 *小型・軽量。 *高パワーレート。 |
*サーボアンプがDCモータ用よりやや複雑。 *モータとサーボアンプは1:1の対応が必要。 *マグネチックは減磁の恐れあり。 |
| IM(誘導)形 ACサーボモータ |
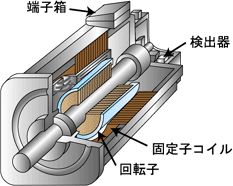 |
*メンテナンスフリー。 *耐環境性に優れている。 *高速・大トルクが可能。 *大容量では、高効率。 *構造が堅牢。 |
*小容量では、低効率サーボアンプがDCモータ用よりやや複雑。 *永久磁石なしのため、停電時の発電制動不可 *温度により特性が変動。 |
| DCサーボモータ | 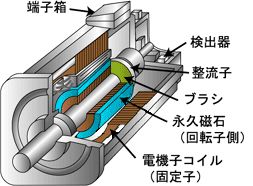 |
*サーボアンプの構成簡単。 *停電時の発電制動が可能。 *小容量では安価。 *高パワーレート。 |
*整流子(ブラシ)周りの保守・定期点検が必要。 *ブラシ磨耗粉が発生するため、クリーンな場所では利用不可。 *整流ブラシの関係で高速大トルクで使用不可。 *マグネチックは減磁の恐れあり。 |
===============================================
HOME 技術資料室 技術用語